GoPlan+ - Continuously optimizing online path planning of multiple robots in industrial applications:
GoPlan+ combines 6 years of experience in using model-based methods in industrial settings in a software system
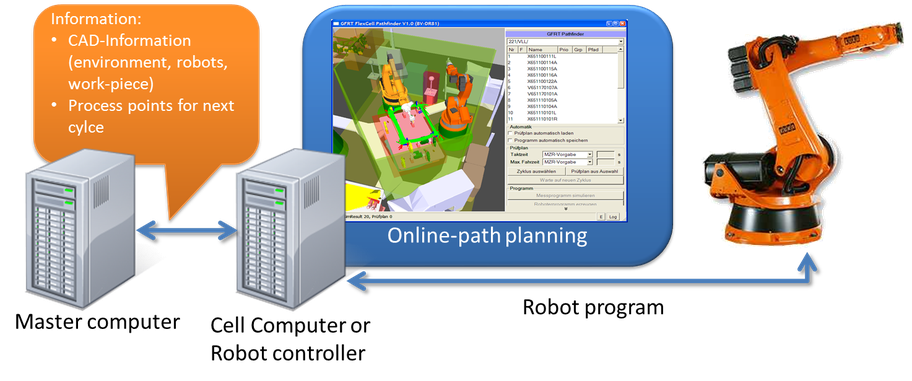
- for online planning of collision-free robot trajectories
- for multi-criteria optimization of movements (eg, execution time, planning time, priorities)
- for continuous adaptation and optimization of paths taking into account the range of available motion commands of the robot controller
- for planning and automatic coordination / synchronization several robots
GoPlan+ combines our technologies in a customizable and easy to use application.
Features
| Industrial proven and cutting-edge online collision checking and -avoidance. | |
| Industry approved online path planning including concept for guraranteed collision-free paths. | |
| Build to be extensible by customers and integrators. | |
| Build for integration (ROS-industrial, OROCOS, AutomationML, OPC-UA, ...). |