Applications and developments of GFRT are based on a modular toolbox witch specifically developed key technologies:
-

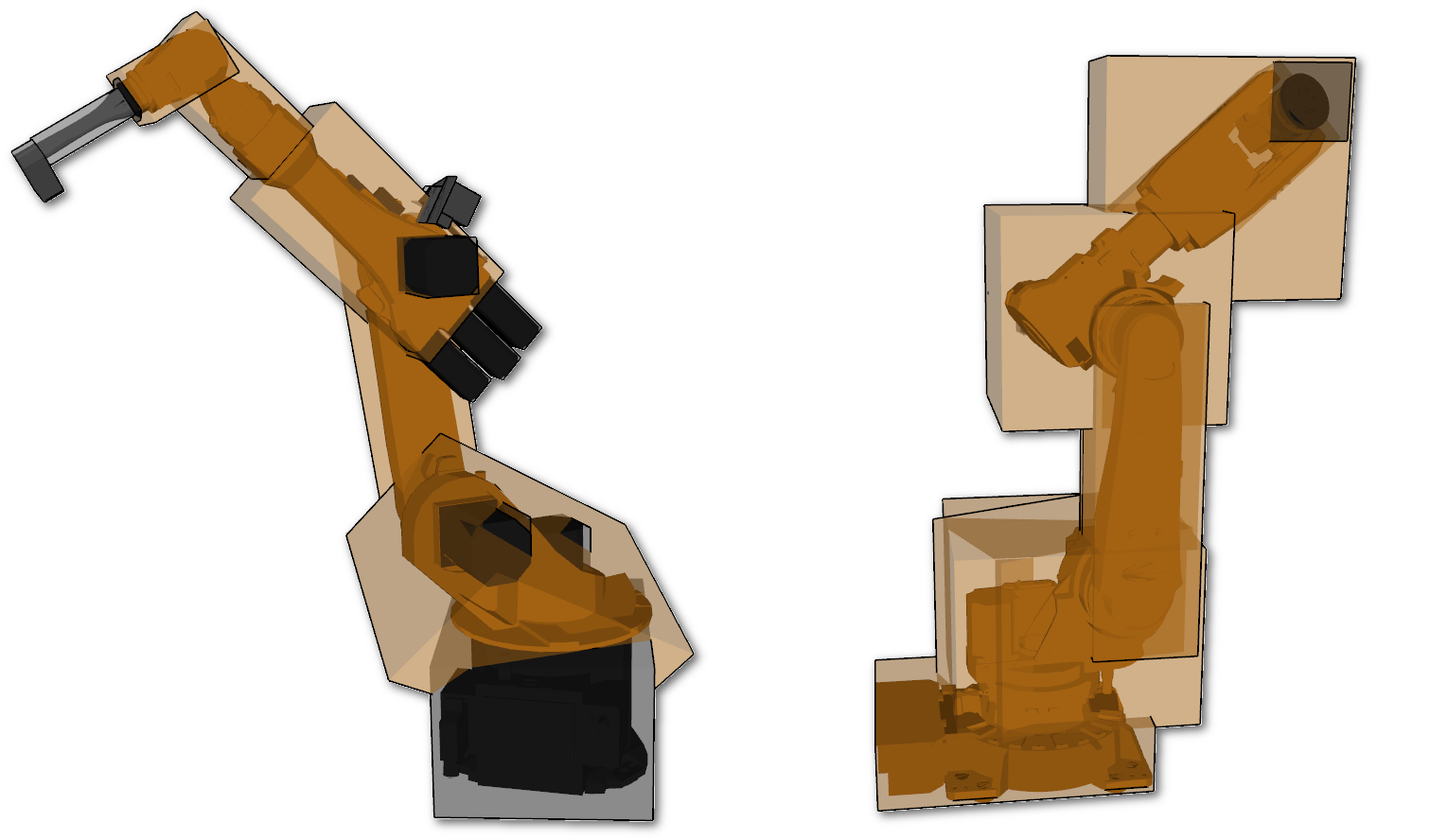
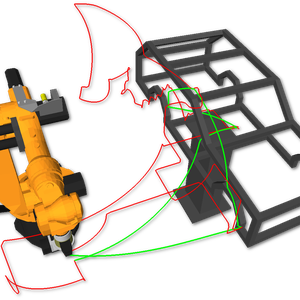
Fast collision checking and distance computation
The performance of a system for the simulation of real processes is highly depending on the performance of its algorithms for visualization, collision and distance calculation. The methods developed by us are based on a hierarchical gradation of simplified bounding objects of multiple shapes (square, spheres, boxes, etc.) best approximating the corresponding object. The bounding object can be then transformed and checked for collision / distance much more quickly. By an additional hierarchical gradation of these bounding objects, the number of computational expensive test is further reduced and only in "dangereous" areas precise geometry data has to be used.
-
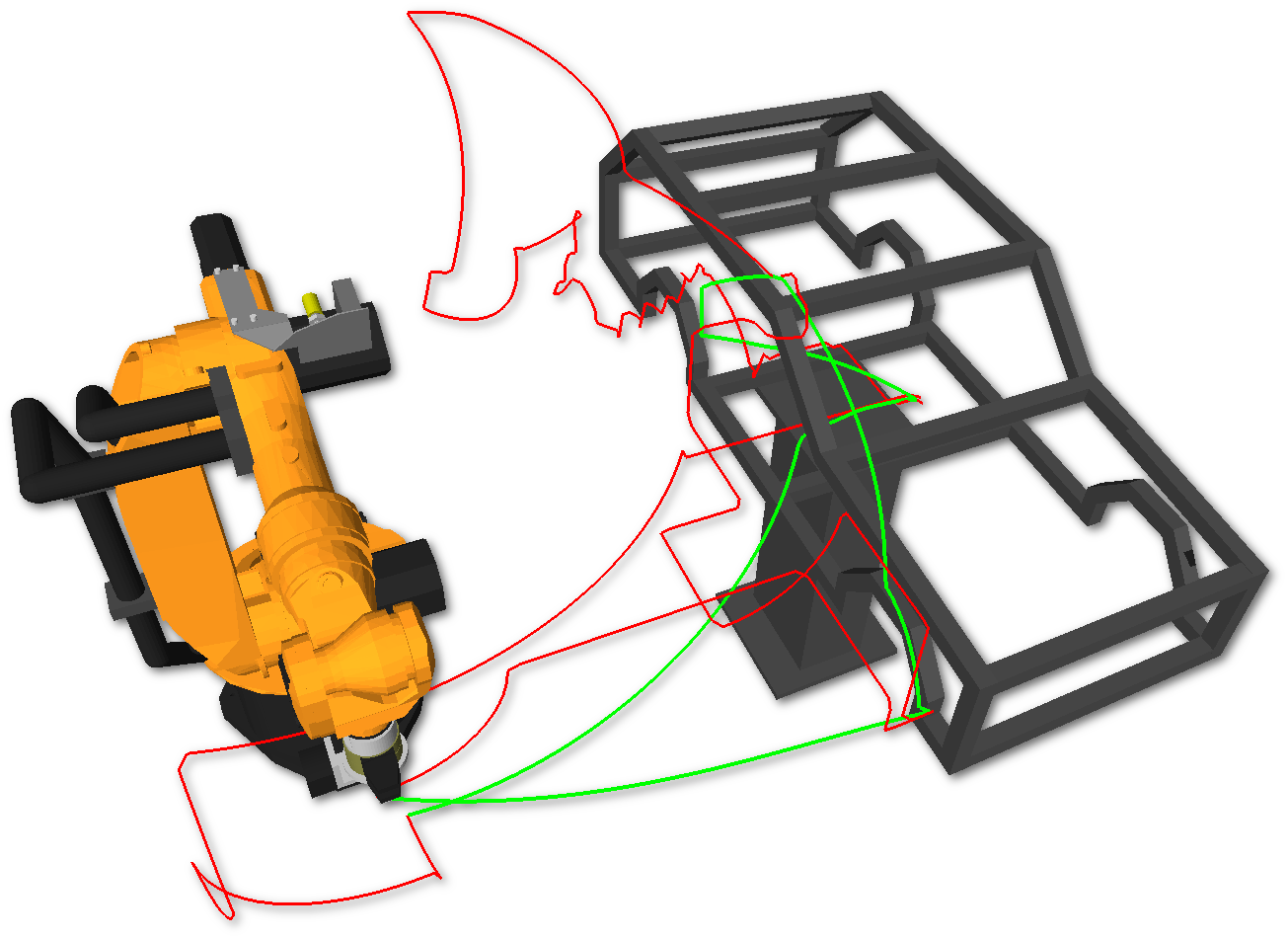
Automatic path planning methods
Path generation / Path optimization / Assembly planning
Based on the above-described blocks for collision and distance calculation a large repertoire of state-of-the-art motion planning algorithms are realized. The methods have a high enough performance to use them online on the shop floor. Products of GFRT that build thereon are for example the online path planning system that has been awarded 2010 with the REIS Award. The system is currently being used in the production of a car manufacturer.
-

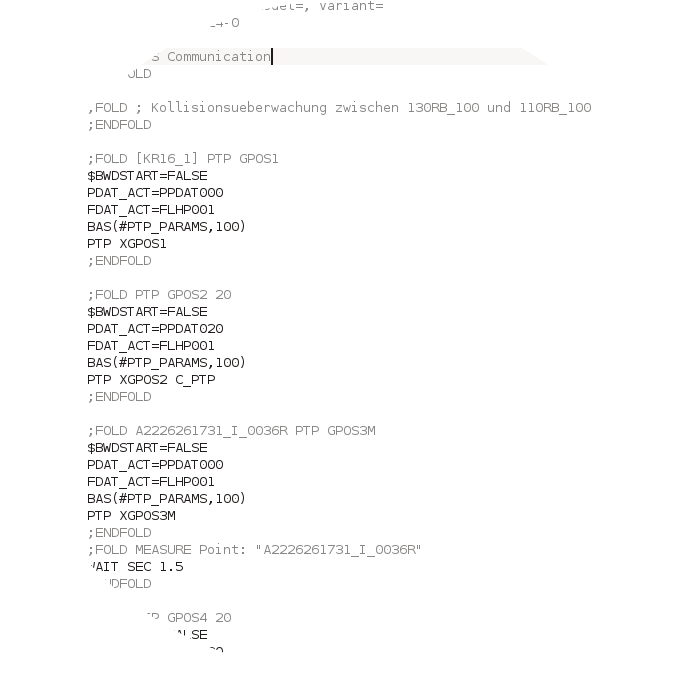
Automated native robot program generation
Based on created collision free robot paths and the process technologies to be applied with the robot and its tool, native robot programs can be generated automatically including both movement and application commands/instructions. These programs can then be automatically uploaded and executed on the robot controllers. The realized and provided template-based description language allows customers to modify the process of creating robot programs and customize the robot program generation to their needs.
-
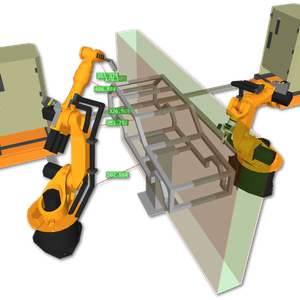
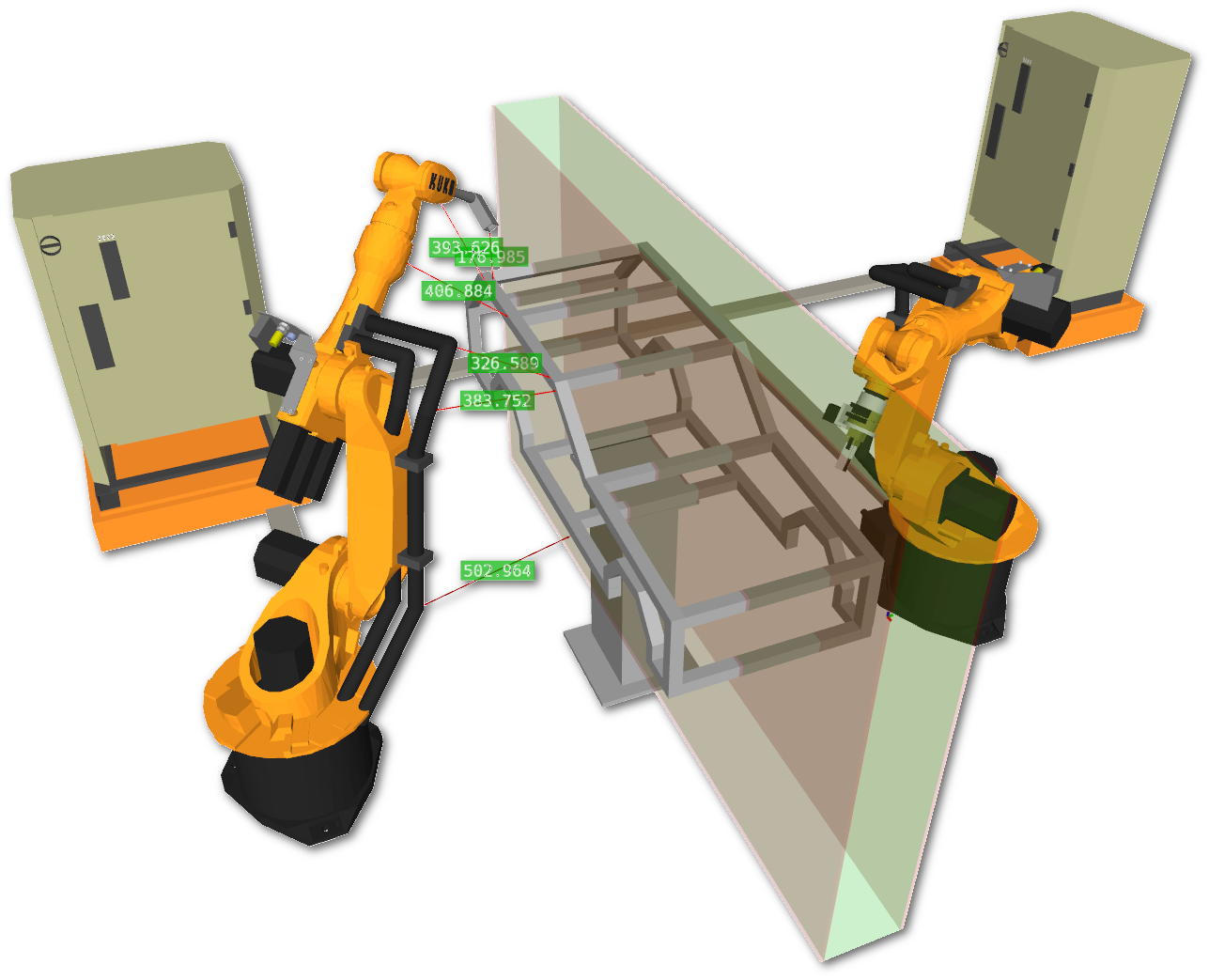
Automatic scheduling and synchronization of several robots
The developed algorithms allow the collision-free path planning and synchronization of multiple robots. An optimization with respect to execution time is realized by an appropriate allocation of application points to available robots and therefore uniform utilization of the robots. Synchronization points are automatically created and signals for securing overlapping workspaces by a PLC are deducted and automatically inserted during robot program generation.
The functionality described above is an integral part of the path planning framework GoPlan+ more...