Applikationen und Entwicklungen der GFRT basieren auf einem modularen Baukasten eigens entwickelter Schlüsseltechnologien:
-

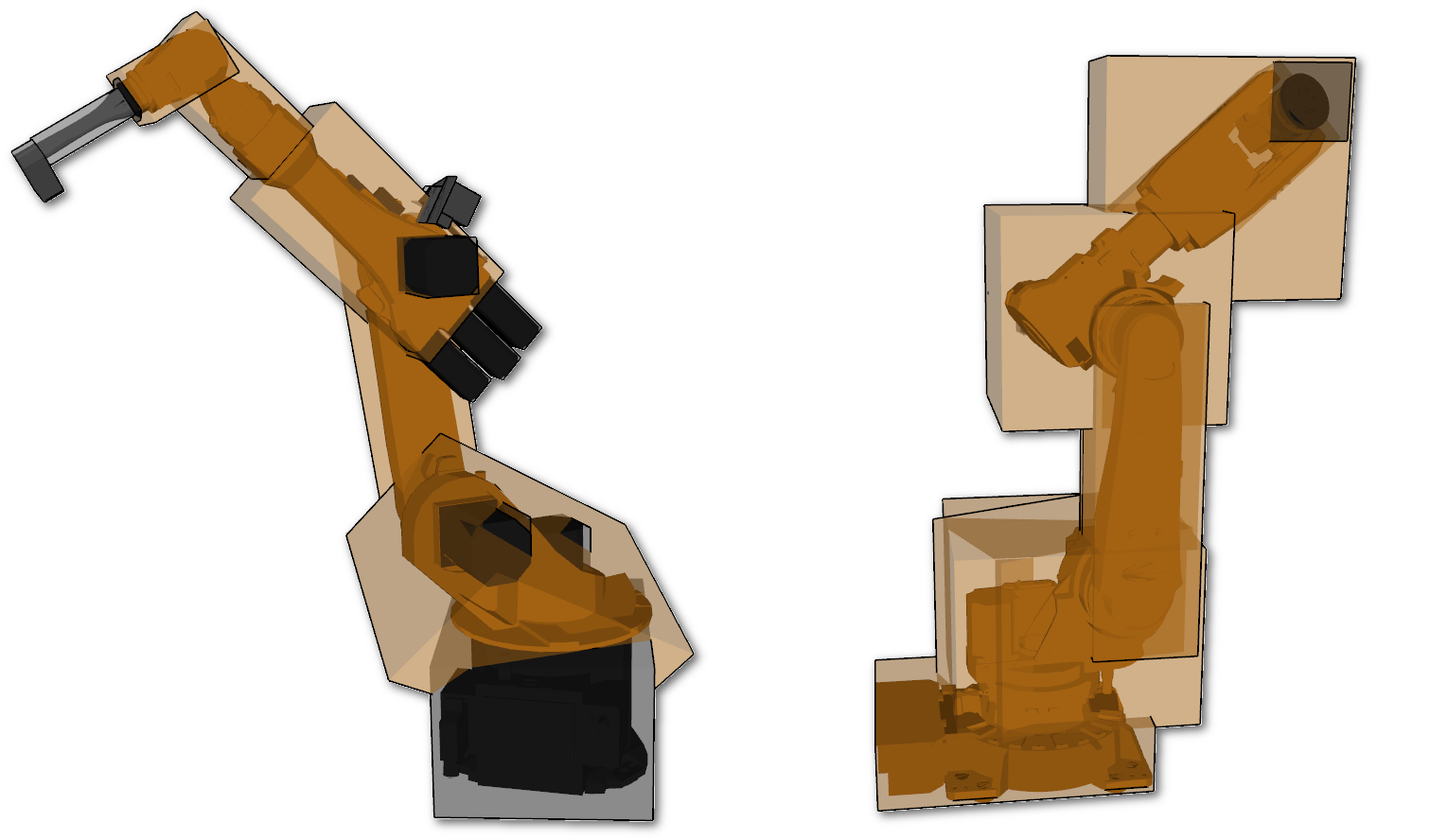
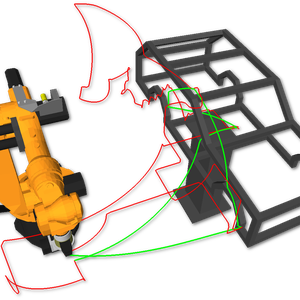
Schnelle Kollisions- und Abstandsberechnung
Die Leistungsfähigkeit eines Systems zur Simulation realer Vorgänge hängt in hohem Maße von der Leistungsfähigkeit seiner Algorithmen zur Visualisierung, Kollisions- und Abstandsberechnung ab. Bei der Entwicklung interaktiver und reaktiver Visualisierungssysteme ist die Entwicklung leistungsfähiger und effizienter Kollisions- und Abstandsberechnungen ein entscheidendes Anliegen. Die von uns entwickelten Verfahren basieren auf einer hierarchischen Abstufung von vereinfachten Hüllobjekten (Quader, Kugeln, usw.). Sie nähern die eigentlichen Objektgeometrien an und können wesentlich schneller transformiert und auf Kollision/Abstand überprüft werden. Durch die hierarchisierte Abstufung dieser Primitive wird die Anzahl der zu testenden Objekte verringert und nur bei "gefährdeten" Gebieten auf genaue Geometriedaten zurückgegriffen. Zusätzlich lässt sich dieses Verfahren auch zur optimierten Visualisierung (Level-Of-Detail) heranziehen.
-
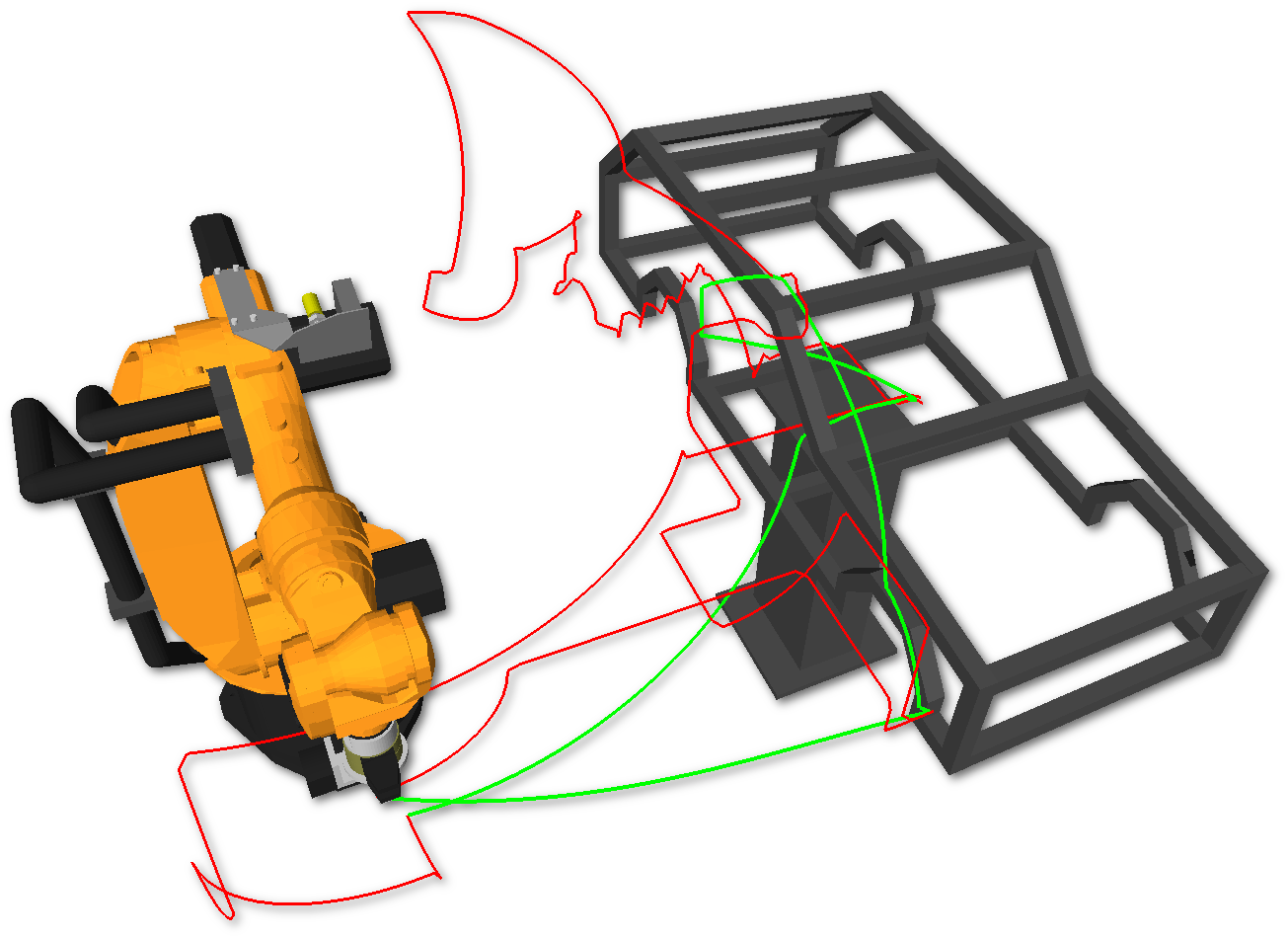
Automatische Bahnplanungsverfahren
Roboterbahngenerierung / Bahnoptimierung / Bahnglättung / Einbausimulation
Basierend auf den zuvor beschriebenen Bausteinen zur Kollisions- und Abstandsberechnung kann auf ein großes Repertoire an State-Of-The-Art Bahnplanungsalgorithmen zurückgegriffen werden. Die Verfahren besitzen eine genügend hohe Performanz, um sie auch online, d.h. in der laufenden Produktion, einsetzen zu können. Produkte der GFRT, die hierauf aufbauen, sind beispielsweise das Online-Bahnplanungssystem, das 2010 mit dem REIS-Award ausgezeichnet wurde und derzeit bei einem Automobilhersteller in der Produktion eingesetzt wird.
-

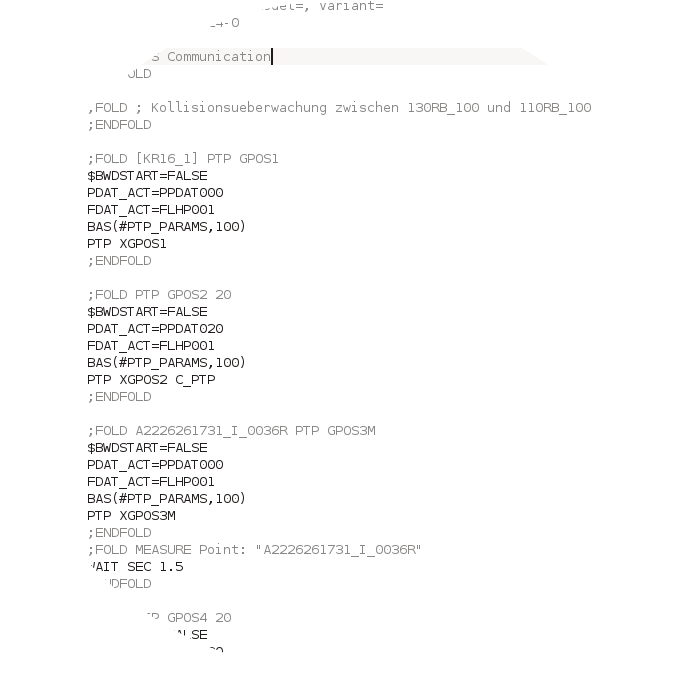
Automatische native Roboterprogrammgenerierung
Basierend auf den zuvor erstellten kollisionsfreien Roboterpfaden und den zu applizierenden Technologien, werden automatisiert native Roboterprogramme, die sowohl Bewegungs- als auch Applikationsbefehle enthalten, erstellt. Diese können dann automatisch auf die Robotersteuerungen hochgeladen und ausgeführt werden. Zum Einsatz kommt eine Template-basierte Beschreibungssprache, die es auch Kunden ermöglicht, in den Erstellungsprozess der Roboterprogramme einzugreifen und diese nach eigenen Vorstellungen zu formen und hinsichtlich kundenspezifischer Gegebenheiten anzupassen.
-
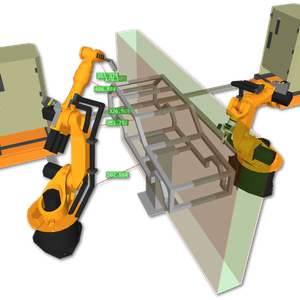
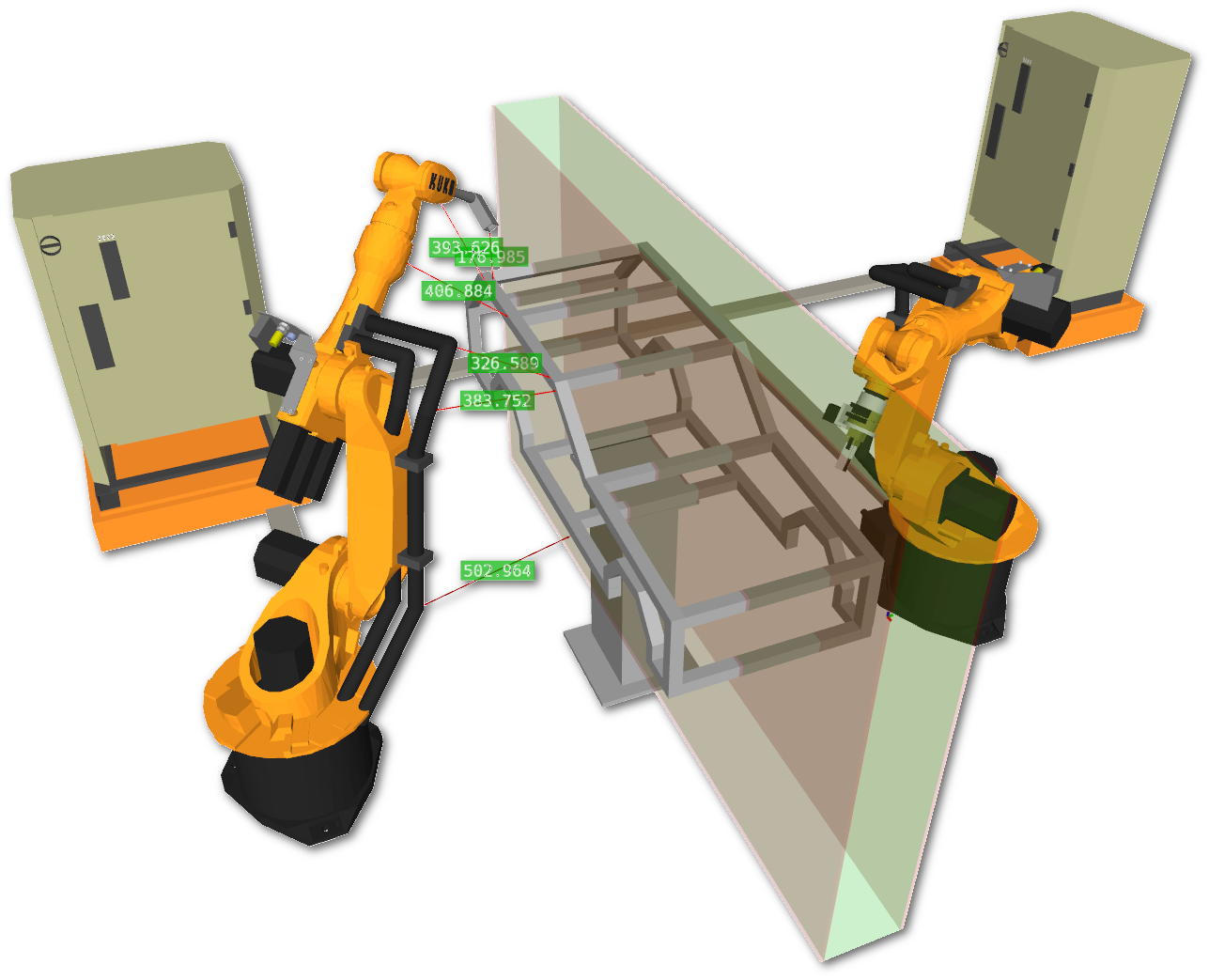
Automatische Planung und Synchronisation mehrerer Roboter
Die entwickelten Algorithmen erlauben die automatische kollisionsfreie Bahnplanung und Synchronisation mehrere Roboter. Eine Optimierung hinsichtlich der Ausführungszeit durch eine geeignete Aufteilung auf die Applikationspunkte und einheitlicher Auslastung der Roboter ist hierdurch möglich. Synchronisationspunkte werden automatisiert erstellt und sichern überlappende Arbeitsbereiche durch SPS-Kommunikation ab.
Die zuvor beschriebenen Funktionalitäten sind wesentlicher Bestandteil des Bahnplanungs-Frameworks GoPlan+ [...mehr zu GoPlan+].